|
Introducción
Control de potencia y sensores Resultados de funcionamiento |
|
Controlador de Observatorio Remoto.
C.O.R.
Actualizado: 30 Julio 2007
|
Introducción
Control de potencia y sensores Resultados de funcionamiento |
|
Abstract.
The Remote Observatory Controller (COR) integrate the necessary devices for the observatory operation.
Using only one PC, the home PC, we can command all the observatory equipment through the ethernet.
The heart COR is a embedded sigle-board computer from Rabbit Semiconductor with four serial ports, 34 I/O pins and ethernet.
At the moment, the COR can operate an automatic telescope (LX200 or compatible), two Audine cameras, a custom filter wheel and shutter, digital focusser, a power control unit and a weather station.
Introducción.
El origen de este trabajo, más que el control remoto, fue evitar los problemas implícitos en el uso del puerto paralelo del PC para manejar la cámara Audine:
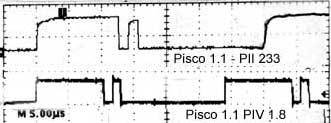
Fig. 1- Ejemplo de cómo varían los relojes en función del PC utilizado.
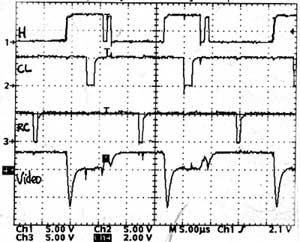
Fig. 2 - Oscilograma generado usando el COR:. una fase horizontal H, el clamping CL, el disparo del convertidor RC, en el puerto paralelo.
El vídeo a la salida del amplificador operacional
Pero resulta que una vez superados los anteriores problemas, nos encontramos que podemos hacer fotos desde cualquier lugar de la casa y obviamente se plantea controlar del resto de dispositivos.
La idea de un observatorio remoto para aficionados, si bien va siendo posible hoy en día, es realmente un proyecto ambicioso puesto que deben ser integrados cómo mínimo los siguientes elementos:
- Telescopio automático.
- Cámaras CCD.
- Sistema de Filtros.
- Enfoque Digital.
- Control de apertura y cierre del observatorio.
- Medida de Condiciones Atmosféricas.
Aunque para realizar todas estas funciones aisladamente existen productos comerciales, son de fabricantes diferentes y cada uno con su software particular. Algunos paquetes para tratamiento de imagen van integrando el uso de estos dispositivos pero sin pensar mucho en el control remoto.
Fig. 3- Diagrama de bloques del sistema propuesto para controlar el observatório.
El planteamiento aquí adoptado para la integración se basa en el uso de un único PC y un controlador diseñado específicamente.
Para el sistema de filtros, enfoque y shutter se ha usado el
CFS (Controlador de Foco, filtro y Shutter) ya que con un solo puerto serie podremos manejar cuatro motores.La comunicación entre el controlador y el PC es evidentemente vía ethernet mediante paquetes UDP. Esto además de facilitar futuras ampliaciones, elimina el problema de distancias y permite el uso de portátiles que no disponen de los puertos necesarios.
Los puertos de control de cámara son eléctricamente compatibles con el puerto paralelo de un PC y por tanto se podrán controlar las cámaras que usen este puerto. Por el momento solo está soportada la
cámara Audine.Cada COR puede controlar dos cámaras alternativamente, para añadir otras cámaras basta añadir otro controlador.
El COR dispone del equivalente eléctrico a tres puertos paralelos de PC (uno de ellos optoaislado) y cuatro puertos serie.
El corazón del COR, es un pequeño procesador de los llamados single-board computer de Rabbit Semiconductor a 22MHZ, con ethernet, 34 I/O, 4 puertos serie, 7 timers, RTC y WDT. El aquí empleado es el RCM2100 con 512KB de SRAM y 512KB de Flash. Puede usarse el RCM2110 con 128KB de SRAM y 256KB de Flash con un coste de unos 75.

Fig. 4 - Vista superior e inferior del CORE RCM2110.
El programa del controlador
está escrito en Dynamic C con algunas rutinas en ensamblador. El Dynamic C trae gran cantidad de librerias y ejemplos que facilitan enormemente el trabajo. El entorno de desarrollo de Rabbit es muy cómodo. El editor es sensible al contexto desde la versión 8 y la documentación en línea es muy completa.Aunque es posible editar el programa del COR, la idea es que no sea necesario hacerlo. Su misión es hacer de puente entre los equipos y el PC, donde se encuentran las configuraciones necesarias. Por ejemplo, en el COR no sabe que ccd tiene la camara ni sus secuencias de lectura. Esa configuracion reside en todo momento en el PC.
Hacer modificaciones ó ampliaciones es de este modo más simple ya que solo hay que tocar el programa del PC.
La comunicación con el COR se basa en un protocolo de mensajes a través de la red. Conociendo esta mensajeria es posible escribir la aplicación para dirigirse al COR independientemente del sistema operativo empleado.
Esquema electrico de la placa: es sencillo puesto que se trata de interconectar dos grandes bloques, el procesador y la FPGA. Solo hay que añadir los driver 232 y los optoacopladores para aislar las líneas de entrada y salida para el control de potencia y sensores.
La lógica complementaria esta cargada en una FPGA XC4003E de Xilinx. La principal característica de estos potentisimos chips es contener un circuito configurable por software y que por tanto puede modificarse sin tocar el circuito impreso. Los elementos que pueden incorporarse a dicho esquema son muy amplios: puertas, biestables, memorias RAM, ROM etc.
Durante el diseño no es necesario entrar en el esquema interno del procesador, solo conocer la posición de los terminales a usar. No ocurre lo mismo con la FPGA donde tenemos las interconexiones de entrada/salida y otros circuitos importantes para el funcionamiento del equipo. La misión principal de los circuitos contenidos en este chip es liberar al procesador de las tareas criticas en tiempo.
Esquema principal de la FPGA: muestra la decodificación de direcciones, algunos registros de control, la definición de los pines externos y la interconexión entre bloques.
El bloque secuenciador (SECSIM2C), se encarga de generar las fases rápidas. Contiene una pequeña RAM de 128 bytes que almacena la sucesión de valores a sacar por el puerto de control en cada momento.
El bloque contador de secuencias (CONSEC) es un contador programable que avisa cuando se ha terminado de hacer el trabajo programado.
El bloque INAUD se encarga de recoger las lecturas del conversor AD.
El circuito impreso (Fig. 5) es de doble cara (12x18 cm), los componentes están en una y los conectores en la otra por lo que no es necesario cableado alguno y se facilita la mecanización de la caja. Dada su complejidad (mas de seiscientos taladros) es difícil fabricarla de forma casera.
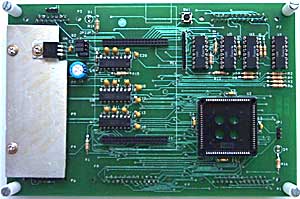
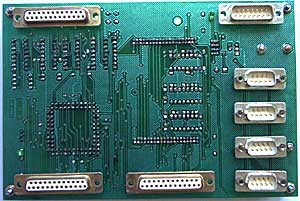
Fig. 5 -Vista superior e inferior del circuito impreso definitivo.
En la cara de conectores, los dos DB25 de la parte inferior son para las cámaras, el de arriba es para control de potencia y sensores tipo fin de carrera y otros. Arriba a la derecha un DB15 para la alimentación y cuatro DB9 para los puertos serie. El de abajo del todo sirve también para la programación del modulo mediante un cable cruzado completo no haciendo falta el cable de programación especial.En la cara de componentes tenemos la FPGA, cuatro chip optoacopladores para el puerto de control de potencia, tres MAX232 y el regulador de 5v. Los dos conectores próximos a los max232 son para conectar el core de Rabbit.
Para reducir el numero y longitud de cables que bajan del telescopio, el controlador de motores puede integrarse en la misma caja del COR situarla sobre el tubo óptico.



Fig. 7 Al telescopio solo llega el cable de alimentación y el cable ethernet.
Con esta disposición es posible equilibrar medianamente el telescopio solo con las cargas útiles. En lugar de la caja con la electrónica, antes era necesario un contrapeso.
El cableado del conjunto puede verse en
este esquema.
Control de potencia y sensores.
Este periférico permite controlar el encendido de los equipos y monitorizar el estado de diversos intercloks. Para este fin, el cor dispone de 10 bits de salida y 6 de entrada optoacoplados. De los 10 bits de salida es posible usar dos para multiplexar los seis de entrada y poder ampliar a 24 los bits de entrada. Estas entradas pueden usarse para conocer si se ha abierto el observatorio, detectar posiciones prohibidas del telescopio etc.
Fig. 8 - Modulo de control de potencia y contactos auxiliares.
En este esquema se muestra el uso de ocho salidas y seis entradas, que en general es mas que suficiente. Los seis pulsadores equivalen a los interlocks que queremos observar.
Modos de funcionamiento.
El control remoto se puede plantear en dos situaciones bien definidas: la más común es que el observatorio esté próximo y la otra situación que se encuentre muy distante. En el segundo caso se tiene que recurrir a comunicaciones adicionales, puede ser teléfono o internet. Por motivos de costes resulta aconsejable usar internet.
En ambos casos se entiende que un operador humano supervisa el funcionamiento del sistema. La automatización del proceso de adquisición se abordara en una fase posterior.
Modo local: el observatorio está distante pero tanto el PC como el COR están en la misma red. Este es el modo normal de trabajo actual y el punto de partida para siguientes ampliaciones.
Fig. 9 - Funcionamiento en red local.
Modo web:
es necesario solo si el observatorio se encuentra muy distante, para ser operado a través de Internet. Para funcionar de esta forma son necesarios dos PCs, el local y el remoto. El PC local ejecuta la aplicación cor a la vez que hace la función de servidor web. Naturalmente para llegar a esta fase, el control en modo local debe estar superado completamente.
Fig. 10 - Funcionamiento en modo web.
Las primeras pruebas pueden verse ocasionalmente en:
http://cor.no-ip.org siempre que el servidor esté arrancado.Para ampliar información y conocer el estado actual del existe una lista muy completa de enlaces a observatorios de control remoto y automáticos en: http://www.uni-sw.gwdg.de/~hessman/MONET/links.html
Programa del PC.
El programa aquí descrito se llama
ACOR (Aplicación para Control de Observatorio Remoto), es para plataformas PC con MS Windows y está escrito con Builder C++ 6.Actualmente el programa permite el control remoto bajo control del operador. En una segunda fase se pretende automatizar la adquisición.
La comunicación con otros programas se realiza mediante COM (Component Object Model). El primer uso de esta propiedad ha sido escribir un driver de telescopio para el SkyMapPro que permite controlar un LX200 a través del COR desde dicho programa. Pinchando en este planetario, las coordenadas para el telescopio en vez de salir por el puerto serie del PC, son enviadas al Acor mediante el driver. Desde la aplicación pasan por la red a un puerto serie del controlador.
Está pendiente realizar el driver para el programa Cartes du Ciel que además de ser un excelente planetario tiene la gran ventaja de ser gratuito.
También es posible usar cualquier otro planetario instalando un puerto serie virtual en el pc. Acor escucha ese puerto redireccionando los mensajes hacia y desde la red.
Fig. 11- Aspecto actual de la Aplicación para Control de Observatorio Remoto, ACOR..
La ventana de la aplicación puede dividirse en dos partes: zona para adquisición y control a la izquierda con pestañas y zona de presentación a la derecha.
Las imágenes procedentes de fichero se abren en ventanas independientes.
En las pestañas podemos encontrar las siguientes funciones:
ADQUISICION: manejo de las dos cámaras, control de filtros y enfoque manual.
CONFIGURACION: parámetros relacionados con el funcionamiento del sistema.
VISUALIZACION: dispone de una lupa y permite abrir y guardar ficheros.
TELESCOPIO: permite monitorizar el estado del telescopio o moverlo manualmente.
CONTROL: este panel se usa para activar o desactivar la alimentación de los equipos del observatorio y mostrar el estado general del mismo.
Enfoque Automático: (Nuevo) Es posible enfocar automáticamente por dos métodos diferentes: con el ya clásico HFD (Half Flux Diameter), que implica trabajar con una única estrella y con el más novedoso método llamado Noise Pixel (NP), para el que se puede usar tanto una estrella como toda la imagen completa con múltiples estrellas y objetos.
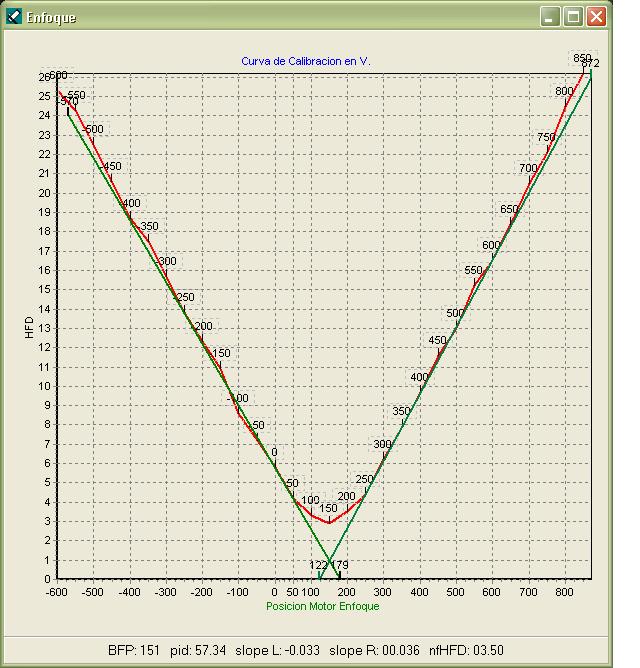
Fig. 13 - Curva en V generada con el parámetro HFD.
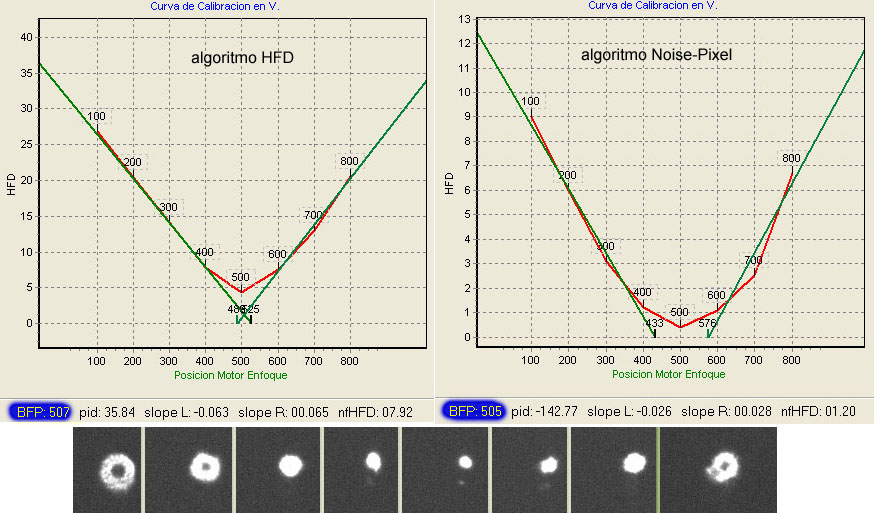
Fig. 13 - Comparación del método HF y NP con las mismas imágenes. El resultado es el mismo.
Resultados de funcionamiento.
Como ya se ha mencionado anteriormente e independientemente del software empleado, el control remoto puede plantearse en dos escenarios bien definidos:
En el presente caso el observatorio ni existe como tal, se trata de la terraza orientada al sur en un noveno piso de Coslada, una zona urbana con más de cien mil habitantes, en el área metropolitana de Madrid. El PC se encuentra en otra vivienda del mismo edificio orientada al norte donde se encuentra el aeropuerto y el cielo es mucho peor.
La situación del telescopio, un LX200 de 8'', dista mucho de ser la ideal. Además de ver solo un trozo de cielo, la contaminación luminosa reduce considerablemente las posibilidades del equipo y un bloque de pisos es el peor sitio posible de cara a la turbulencia. Estos inconvenientes son contrarrestados por una verdad muy simple: el mejor telescopio es aquel que se puede usar. De poco sirve una magnifica instalación si solo podamos usarla en vacaciones.
A pesar de ello y gracias a la tecnología CCD una toma de dos minutos sin tratamiento ni calibrado alguno permite detectar estrellas en torno a la magnitud 17.2.
El telescopio se coloca sobre una plataforma previamente alineada y una vez orientado con alguna estrella brillante, no es necesario volver a salir a la calle para nada. El control se realiza cómodamente desde una habitación de la casa.
El ordenador de adquisición no necesita ser potente, si no va a estar cargado con otras aplicaciones más exigentes basta incluso con un viejo pentium a120MHz.
Estas son algunas de las primeras imágenes adquiridas desde la terraza usando el COR y una Audine-CG3 con KAF401. Si el cielo es muy bueno el efecto de la contaminación luminosa es soportable, de lo contrario el efecto sobre la imagen será difícil de corregir con un flat normal.
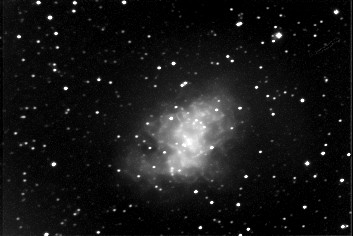
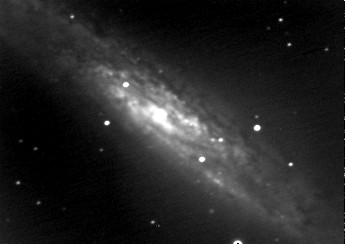
Fig. 12 -
M1, promediado de 20 tomas de 2 min. NGC253, 15 imágenes de 2min. Procesado básico en ambas imagenes.
Controlador de alimentaciones web.
Es posible usar el COR en modo web para control de alimentaciones y estados del observatorio. En este caso no es necesaria la FPGA, al no contemplarse la adquisición de imágenes.
Este firmware permite usar el controlador como IP power de hasta 8 salidas y 24 entradas todas optoacopladas.
Si se dispone de una estación meteorológica EMA, podremos conocer las condiciones atmosfericas antes de activar ningun equipo.
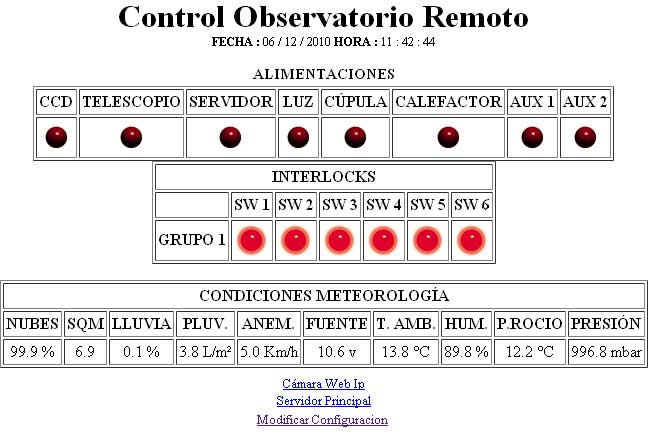
Fig. 13 Página web de inicoi para el acceso en modo web.
La aplicación consta de dos páginas bastante sencillas. En la página de entrada se muestra el estado de las salidas, las seis primeras entradas y la información meteorológica.
Al pinchar "Modificar Configuración" se solicita usuario y contraseña, dandose paso a la página desde la que ya es posible activar o desactivar dispositivos.
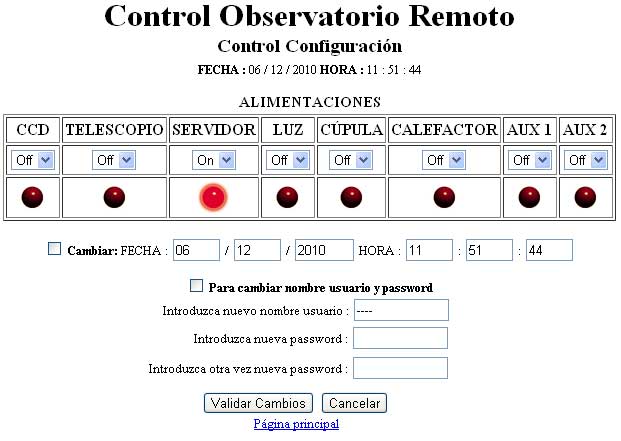
Fig. 14 Página web de control.
Estado del proyecto.
Junio 2007:
Abril 2007:
Febrero 2006:
Agosto 2005:
Enero 2005:
Abril 2004:
Noviembre 2003:
Octubre 2003:
Enero 2003:
Agosto 2002
: Las principales funcionalidades son operativas, al menos de un modo básico.
Participantes.
Javier Almería: programas del PC.
Javier Pérez: Programa del RCM2100.
Rafael Gonzalez: ntofocus.dll
Cristobal García: Xilinx, electrónica, mecánica y programa PC.
Es posible encontrar más información y fotos en el grupo "Observatorio Remoto".
Desde el grupo, los interesados en el montje organizan el pedido de materiales y la puesta en marcha del controlador. Igualmete es donde estan disponibles las ultimas actualizaciones del software.
